



Firmen im Artikel
Der permanenterregte Synchronmotor mit Oberflächenmagneten, auch SPM-Motor (Surface Permanent Magnet Motor) genannt, hat in den letzten Jahrzehnten in vielen Bereichen der Automatisierung den Asynchronmotor erfolgreich verdrängt. Wesentliche Gründe dafür sind bessere Eigenschaften unter anderem in Bezug auf Leistungsdichte, Wirkungsgrad, Rotortemperatur, maximales Drehmoment und Gewicht. Verhältnismäßig neu ist der Siegeszug des IPM-Motors (Interior Permanent Magnet Motor). Im Gegensatz zum SPM-Motor, bei dem die Permanentmagnete auf der Rotoroberfläche montiert sind, werden bei diesem permanenterregten Synchronmotor die Magnete im Rotor integriert beziehungsweise im Rotorblechpaket eingebettet beziehungsweise vergraben.
Frequenzumrichter für die Regelung von IPM-Motoren
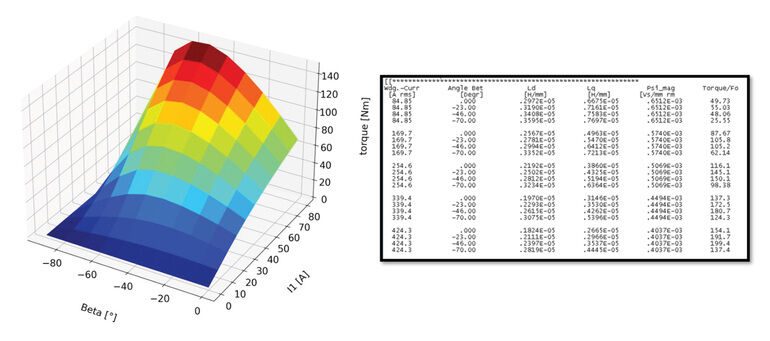
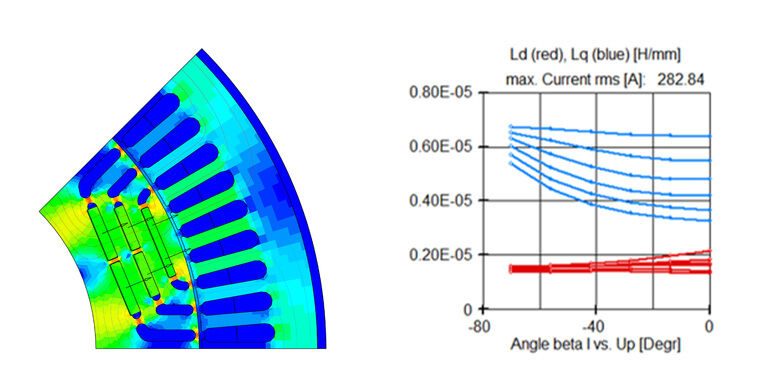
Der IPM-Motor erreicht topologiebedingt – verglichen mit dem SPM-Motor – deutlich höhere Motorinduktivitäten, was für den Betrieb an modernen Frequenzumrichtern sehr vorteilhaft ist. Aufgrund der höheren Motorinduktivität lässt sich über den Frequenzumrichter auch der in vielen Applikationen erforderliche Feldschwächbereich besser darstellen (Drehzahlbereich an maximal verfügbarer Spannung). Zudem werden umrichterbedingte Zusatzverluste in den Magneten stark reduziert, was in einem kühleren Rotor und einem erhöhten Wirkungsgrad resultiert. Sind beim SPM-Motor die beiden für die Regelung entscheidenden Induktivitäten Ld und Lq gleich und über weite Frequenz- und Strombereiche als konstant anzusehen, verhält sich das beim IPM-Motor durchaus anders (LdLq). Ld und Lq sind beim IPM-Motor hingegen ungleich, sättigungsabhängig und somit nicht linear und veränderlich in Abhängigkeit des Motorstromes aber auch der Frequenz. Darüber hinaus ist der Winkel zwischen den vom Umrichter einzuprägenden Strömen Id und Iq arbeitspunktabhängig.
Zusätzliches Drehmoment durch ungleiche Induktivitäten
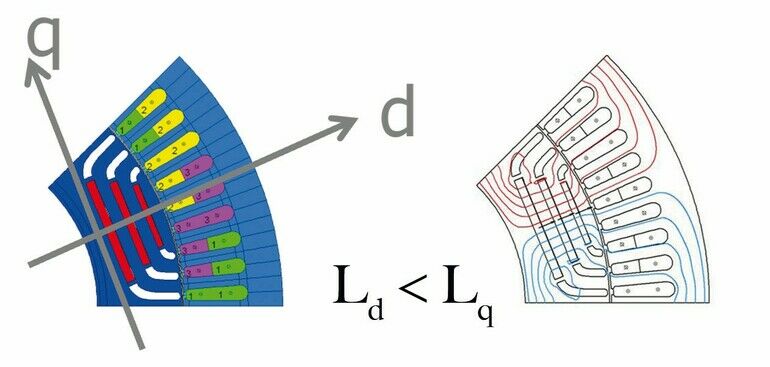
Der Induktivitätsunterschied LdLq birgt einen topologischen Vorteil: Dabei kann ein zusätzliches Drehmoment genutzt werden, mit Hilfe gezielt eingebrachter Aussparungen im Rotorblech. Diese Aussparungen sorgen dafür, dass bei einem externen magnetischen Feld, sich der Rotor in die Position mit der höchsten magnetischen Leitfähigkeit dreht. Das zusätzliche Drehmoment ist das sogenannte Reluktanzmoment und kann ohne eine Phasenstromerhöhung oder Magnete gewonnen werden – „kostenlos“ sozusagen. Gleichzeitig lässt sich hierdurch ebenfalls teures Magnetmaterial einsparen. Um dieses Reluktanzmoment nutzen zu können, wird nach der Drehmomentformel
M = m/2 p (ΨPMIq) + (Ld – Lq) Id Iq
ein zusätzlicher negativer d-Strom (Id) benötigt, der sich lediglich aus dem Verdrehen des Phasenstromszeigers (IS) ergibt. Durch eine orthogonale Zerlegung des Phasenstromzeigers IS können die Ströme Id und Iq errechnet werden. Durch die negative Induktivitätsdifferenz (LdLq) ergibt sich mit dem negativen d-Strom ein positives Drehmoment. Hierdurch bleiben die strombedingten Kupferverluste durch den Statorstrom IS konstant, wobei das Drehmoment in der Maschine steigt. Bei den SPM-Motoren beträgt der Stromwinkel (außerhalb des Feldschwächbereichs) hingegen immer konstant 90°, da Lq=Ld ist. Allerdings erfordert der IPM-Motor gegenüber dem SPM-Motor regelungstechnisch deutlich mehr Aufwand im Frequenzumrichter. Die vielen Abhängigkeiten des IPM-Motors können nur dann optimal geregelt und ausgenutzt werden, wenn vom Motorhersteller exzellente betriebspunktabhängige Motordaten vorliegen. Denn Fehler in den Motordaten sind aufgrund der vielfältigen Abhängigkeiten der einzelnen Parameter voneinander ansonsten nicht oder fast nicht identifizierbar.
Frequenzumrichter – Motorenhersteller benötigen Regelstrategie
„Für uns als Motorenhersteller ist es essenziell, dass bei unseren IPM-Motoren der Stromwinkel in Abhängigkeit des Betriebspunktes optimal in die Maschine eingeprägt wird“, erläutert Walter Schierl, Entwicklungsleiter bei der ATE Antriebstechnik und Entwicklungs GmbH & Co. KG – ein Unternehmen, das seit langem eng mit den Antriebstechnik-Spezialisten zusammenarbeitet. „Damit verfolgen wir das Ziel, in jedem Betriebspunkt das maximal mögliche Drehmoment, bei gleichzeitigen minimalen Verlusten, für unsere Kunden herauszuholen.“ Der Hintergrund: Die heutigen Anforderungen an Wirkungsgrad, Bauraum und Drehmomentdichte können nur erreicht werden, wenn die Maschine optimal bestromt und ausgenutzt wird. „Dabei sind neue Reglerstrukturen, wie die von Sieb & Meyer, der nächste unverzichtbare Technologieschritt in Richtung Zukunft“, so Schierl. „Um den IPM-Motor optimal zu regeln, bedarf es einer ausgeklügelten Strategie“, bestätigt Rolf Gerhardt, Leiter Vertrieb Antriebselektronik bei den Lüneburgern. „Nur so lässt sich in jedem Arbeitspunkt ein Maximum an Effizienz und Drehmoment erreichen.“ Viele Standardumrichter begnügen sich damit, den notwendigen Winkel für einen Arbeitspunkt bei Volllast zu ermitteln, der dann auch im Teillastbetrieb aufrechterhalten wird. Das jedoch führt zu deutlich erhöhten Motorströmen beziehungsweise nicht optimalen Stromwinkeln. So wird zu viel Phasenstrom für das gleiche Drehmoment benötigt, was sich wiederum in einer erhöhten Statortemperatur auswirkt. Alternativ wird weniger Drehmoment erzeugt, als der IPM-Motor bei diesem umrichtergestellten Phasenstrom real leisten könnte.
Frequenzumrichterbaureihe SD4S bietet optimale Voraussetzungen
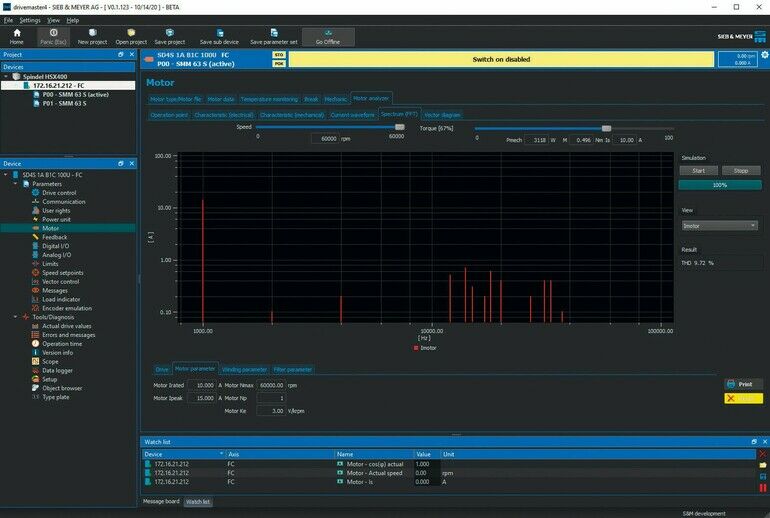
„Nicht zuletzt sollte die Abhängigkeit der Motorinduktivität von Strom und Frequenz bedacht werden“, erläutert Rolf Gerhardt. „Insbesondere die Induktivitäten Ld und Lq stehen dabei im Fokus.“ Nur die Berücksichtigung dieser Abhängigkeit optimiert den Wirkungsgrad und verhindert Fehlwinkel sowie unnötige Verlustleistungen. Die neue Umrichterbaureihe SD4S berücksichtigt alle genannten Anforderungen. Die beschriebenen Abhängigkeiten werden durch spezielle Regelstrukturen genau erfasst und im jeweiligen Arbeitspunkt optimal geregelt, sodass sich immer das optimale Moment bei gleichzeitig geringstem Motorstrom ergibt (MTPA = Maximum Torque per Ampere). Die Verluste im Motor und Umrichter werden minimiert, was die Energiebilanz verbessert, Magnetmaterialeinsatz reduziert und zudem nennenswerte CO2-Reduzierungen mit sich bringt. Die Bedien- und Parametriersoftware drivemaster4 ermöglicht alle erwähnten Einstellungen für den optimalen Betrieb des IPM-Motors. „Unsere neue Regelstrategie ermöglicht Motorherstellern und -betreibern einen optimalen Betrieb von IPM-Motoren“, fasst Rolf Gerhardt zusammen. „Das ist auf dem Markt bislang äußerst selten.“ (jg)
Details zur Frequenzumrichter-Produktfamilie SD4x von Sieb & Meyer.
Kontakt:
Sieb & Meyer AG
Auf dem Schmaarkamp 21
21399 Lüneburg
Tel. +49 4131 203–0
info@sieb-meyer.de




{kind=link}