
Robotik ist Mechatronik in Reinkultur. Sie kann nur erfolgreich sein, wenn ein ausgewogenes Verhältnis von Integration und Modularisierung gefunden wird. Integration ergibt das Gesamtpaket, Modularisierung erlaubt das wirtschaftliche Verwenden von Standardkomponenten. Bewegungsgüte ergibt sich aber erst aus dem Zusammenspiel aller Komponenten. Es hilft nicht, nur ein Element zu optimieren.
Urs Kafader, verantwortlich für die technische Ausbildung bei maxon motor in Sachseln, Schweiz.
Wie findet man geeignete Antriebskomponenten für die Robotik? Nun, grundsätzlich folgt man der gleichen Logik wie bei allen Anwendungen. In der Robotik haben aber mechatronische Aspekte einen speziell hohen Stellenwert: Aktuatoren, Sensorik, Mechanik und Elektronik – alle verbunden mit einer geeigneten Programmierung. Regelungstechnisch gilt es meist, ein Mehrachssystem zu koordinieren. Der Grad an Koordination und Synchronisation ist dabei abhängig von der konkreten Aufgabe und der geforderten Dynamik. Wichtig ist die Balance zwischen Modularisierung und zentraler Koordination der Achsen.
Motoren und mechanische Aspekte
Arm- oder Beinprothesen sind typische Beispiele für mechatronische Systeme. Die eingesetzten Motoren können ganz unterschiedlichen Zwecken dienen: der Bewegung eines Greifers, eines einzelnen Fingers oder der Bewegung eines ganzen Arms oder Beins. Der Motor am Schultergelenk muss relativ stark und groß sein, während die Motoren in der Hand klein und leicht sein sollten, um Gewicht und Massenträgheit zu sparen. Die Auswahl des Motors richtet sich nach dem benötigten Drehmoment und der Dynamik der Anwendung. Dabei ist die Dynamik weniger eine Frage der Rotationsgeschwindigkeit als des Beschleunigungsvermögens. Regelungstechnisch hat die verwendete Mechanik einen großen Einfluss. Einerseits tragen mechanische Komponenten zur Massenträgheit bei, können eine Lastträgheit aber auch auf ein erträgliches Mass für den Motor verkleinern. Andererseits weisen mechanische Komponenten Spiel und elastisches Verhalten auf. Das erschwert eine genaue Regelung. Bei hochdynamischen Anwendungen versucht man deshalb, Direktantriebe zu verwenden.
Modularisierung der Antriebe
Modularisierung für Antriebe heißt: Jeder Motor wird lokal über einen intelligenten Regler angesteuert. Die Bewegungsbefehle verschickt der zentrale Rechner über einen Feldbus. Solche dezentralen Strategien erlauben eine hohe Flexibilität und haben viele Vorteile:
- Das Reglermodul kann präzise an den Motortyp angepasst werden.
- Die lokale Verkabelung von Motor und Istwertgeber spart die aufwändige Abschirmung. Einzig die Busleitung und die Leistung müssen an das jeweilige Modul geführt werden.
- Modularisierung erlaubt es, Standardkomponenten einzusetzen. Der Entwicklungsaufwand fokussiert sich auf die Integration ins Gesamtsystem.
Im einfachsten Fall müssen mehrere Achsen unabhängig voneinander eingestellt werden. Wie bei einem Greifer, der auf einem x-y-Tisch montiert ist. Der Greifer kann einen Gegenstand packen und loslassen – unabhängig von der aktuellen Position. Die Bewegung in x- und y-Richtung an eine bestimmte Position kann nacheinander oder miteinander erfolgen. Man spricht hier von lose gekoppelten Achsen, die über den Feldbus Bewegungsbefehle vom zentralen Mastersystem erhalten. In den Modulen werden die Bewegungen autonom ausgeführt und geregelt. Im Portfolio von maxon motor entspricht die EPOS-Produktfamilie im Positioniermodus solchen lose gekoppelten dezentralen Modulen. EPOS-Positioniersteuerungen werden über den CANopen-Feldbus angesprochen. Allerdings stößt diese Art der Regelung an Grenzen. Zum präzisen Zuschneiden von Leder oder Folien auf einem x-y-Tisch müssen die Achsen viel stärker koordiniert und synchronisiert sein.
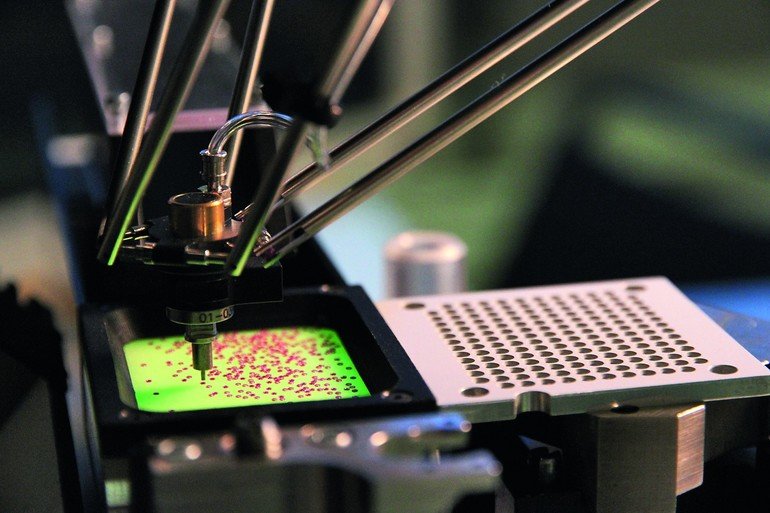
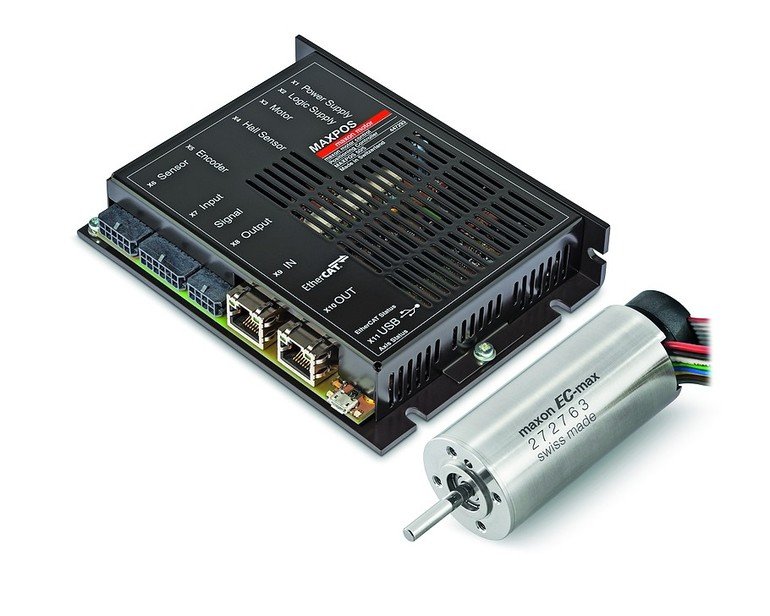
Bei komplexeren Aufgabenstellungen erfolgt die Koordination der Achsen zentral. In Delta-Robotern sind drei Motoren mechanisch eng gekoppelt, und ihre Ansteuerung muss aufeinander abgestimmt sein. In Systemen mit eng gekoppelten Achsen wird der Positionsregelkreis nicht mehr lokal im Modul geschlossen, sondern zentral im Master. Die Module dienen entweder als Geschwindigkeitsregler oder werden bei höchsten Anforderungen an Dynamik im Stromreglermodus betrieben. Jede Achse sendet Informationen zum Bewegungszustand an den Rechner. Die zentrale Bahnplanung und Regelung leitet daraus Bewegungsbefehle für das weitere Vorgehen ab und verschickt diese an die einzelnen Achsen. Eng gekoppelte Systeme benötigen ein Echtzeit-Bussystem. Die Rechenkapazität von Motion Controller und Mastersystem müssen diesen Anforderungen ebenfalls genügen. Im Portfolio des Unternehmens steht für solche Anwendungen die MAXPOS bereit. Dieser Ethercat-Slave Motion Controller empfängt Bewegungs- und I/O-Befehle von einem übergeordneten Ethercat-Master, der die Prozessablaufsteuerung übernimmt. Die sehr schnellen Regler in Verbindung mit den vielfältigen Feedbackmöglichkeiten schaffen die Voraussetzungen für den Betrieb in High-Performance-Anwendungen.
Feedback-Sensoren
Die Standardsensoren bei Kleinstantrieben sind Inkrementalencoder. Sie liefern die Positionsinformation relativ zu einer Referenzposition, die beim Start erst ermittelt werden muss. Bei komplexen Mehrachssystemen ist eine Referenzfahrt aber oft nicht möglich. Man denke an einen Roboterarm mit mehreren Gelenken. In welcher Reihenfolge müssen die Referenzfahrten der einzelnen Gelenke durchgeführt werden, ohne die Anlage zu beschädigen, wenn die Ausgangsstellung des Arms nicht bekannt ist? Absolutencoder erkennen die absolute Stellung der einzelnen Achsen gleich beim Start. Sie sind einfach realisierbar, wenn die Winkelposition nur in einer Motorumdrehung kodiert werden muss (single turn). Multi-turn-Encoder erfordern zusätzlich einen Mechanismus zur Bestimmung und Speicherung der Anzahl Umdrehungen der Motorwelle. jg
Kontakt
info
maxon motor GmbH
München
Tel. +49 89 420493-0
Teilen:




{kind=link}