
Inhaltsverzeichnis
1. Sichere Geschwindigkeitsüberwachung
2. Grenzwerte für spezifische Körperbereiche
3. Frühzeitige Berücksichtigung sämtlicher Parameter
4. Risikobeurteilung der gesamten Applikation
5. Leistungsspektrum in allen Zyklusphasen
In traditionellen Industrieanlagen gibt es bereits Bereiche, die Mensch und Roboter gemeinsam nutzen. So legt ein Produktionsmitarbeiter beispielsweise Teile für die Fertigung in eine Vorrichtung ein, die der Roboter dann entnimmt und weiter bearbeitet. Beide Parteien halten sich in der Regel nicht gleichzeitig im Raum auf. Während der Mensch tätig ist, wird der Bereich für die Bewegungen des Roboters gesperrt. Das geschieht über einen sicherheitsbewerteten überwachten Halt des Roboters. In diesem Zusammenhang sprechen die Fachleute überwiegend von Koexistenz statt von Mensch-Roboter-Kollaboration, da entweder der Roboter oder der Mensch Arbeiten im gemeinsamen Raum verrichten kann. In der EN ISO 10218-1:2011 werden folgende Kollaborationsarten aufgeführt: Handführung, sicherheitsbewerteter überwachter Halt, Geschwindigkeits- und Abstandsüberwachung sowie Leistungs- und Kraftbegrenzung. Zunächst ist zu klären, welche Schutzmaßnahmen sich für die Applikation eignen, und ob die verschiedenen Ansätze verknüpft werden müssen, wenn kein Schutzzaun vorhanden ist.
Sichere Geschwindigkeitsüberwachung
Zu Beginn der Planung hat sich der Anwender ferner Gedanken darüber zu machen, welche Leistung und Geschwindigkeit vom System erwartet wird. Ein hochdynamisches Robotersystem, das mit schweren Lasten hantiert, lässt sich kaum für eine dauerhafte Zusammenarbeit mit dem Menschen auslegen, weil bei einer möglichen Kollision hohe Kräfte auftreten. Durch die Kombination von Geschwindigkeits- und Abstandsüberwachung sowie der Leistungs- und Kraftbegrenzung kann im Allgemeinen eine höhere Zykluszeit des Roboters erreicht werden. Dazu muss der Roboter jedoch während der Zeiten des Werkereingriffs seine Geschwindigkeit reduzieren. Dabei ist zu beachten, dass die Geschwindigkeitsüberwachung unbedingt sicherheitsgerichtet ausgelegt sein muss. Ist sie nicht gemäß EN ISO 10218 als Sicherheitsfunktion in den Roboter integriert worden, muss immer die maximale Geschwindigkeit angenommen werden. Unterschiedliche Leichtbauroboter vereinfachen die Einbindung von MRK-Lösungen, da sie aufgrund der geringeren Massenträgheitsmomente bei einem Zusammenstoß systemseitig geringere dynamische Kräfte erzeugen.
Grenzwerte für spezifische Körperbereiche
Zur Umsetzung einer sicheren Roboteranlage reicht es allerdings nicht, wenn lediglich Leichtbauroboter eingesetzt werden. In der EN ISO 10218 sind die Sicherheitsanforderungen für den Bau und die Integration von Robotern beschrieben. Der Standard umfasst auch die Forderung nach einer Leistungs- und Kraftbegrenzung. Die in einer früheren Ausgabe aufgeführte maximale Leistung von 80 W sowie maximale Kraft von 150 N wurden in der Folgeversion der Norm wieder gestrichen, weil Erkenntnisse belegen, dass diese Werte nicht für alle Körperregionen einen ausreichenden Schutz bieten.
Die aktuelle Ausgabe EN ISO 10218-1:2011 verweist hinsichtlich des Betriebs von kollaborierenden Robotern auf die ISO/TS 15066, die zusätzliche Informationen und Hinweise beinhaltet. So enthält die ISO/TS 15066 im informativen Anhang biomechanische Grenzwerte für spezifische Körperbereiche. Durch die Festlegung derartiger Daten am Körpermodell sollen Belastungen vermieden werden, die im Fall eines Kontakts zwischen Bedienperson und Roboter zu Verletzungen führen könnten. Dabei sind sowohl die Kraftgrenzen als auch der zulässige Druck einzuhalten. Bei einer großen Kontaktoberfläche erweist sich eher die Kraftgrenze als begrenzender Faktor, während bei einer kleinen Fläche eher die Druckgrenze entscheidend ist. Große sowie abgerundete Flächen wirken sich positiv aus.
Frühzeitige Berücksichtigung sämtlicher Parameter
Welche Grenzen zu erfüllen sind, wird durch eine eingehende Risikobeurteilung unter Berücksichtigung der ISO/TS 15066 definiert. Bereits bei der Planung der Anlage müssen sämtliche Parameter für eine MRK-Anwendung beachtet werden. Auf diese Weise lässt sich frühzeitig vor der Beschaffung und Errichtung von Roboter und Werkzeugen erkennen, ob eine geeignete Auswahl getroffen worden ist, die Schutzkonzepte passen oder ob der Prozess anders konzipiert werden muss. Durch Fehlplanung entstehende Kosten können somit verhindert werden. Für den jeweiligen Einsatzzweck ist also zu beurteilen, inwieweit bei der Anwendung mit den entsprechenden Vorrichtungen und Greifwerkzeugen die zulässigen Kraft- und Druckwerte unter Berücksichtigung der Körperregion eingehalten werden. Zu diesem Zweck sind die Geometrien der Kontaktflächen baldmöglichst in die Überlegungen einzubeziehen.
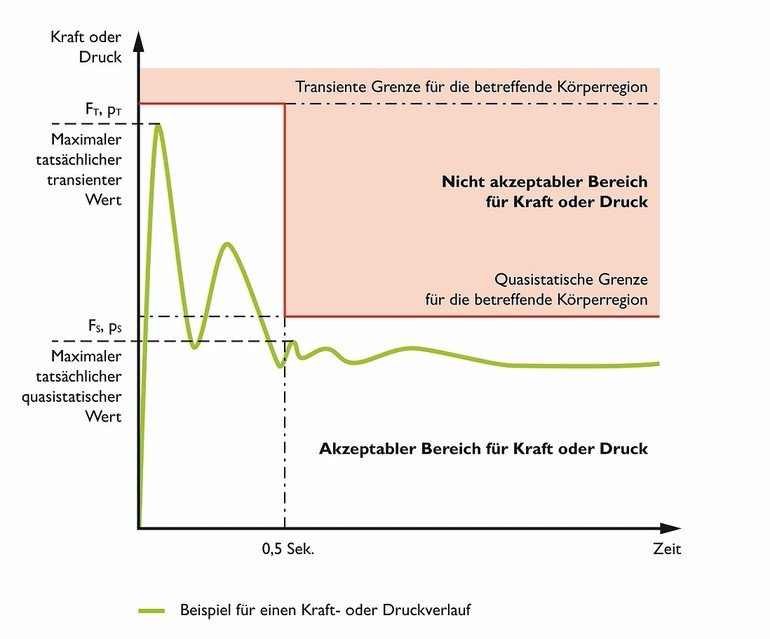
Bei einer potenziellen Klemmung können für einen sehr kurzen Zeitraum Spitzenwerte von Kraft und Druck entstehen. Diese Spitzenwerte dürfen den Wert für den maximalen transienten Kontakt nicht überschreiten. Nach 0,5 s ist dann ein Übersteigen des Wertes für den quasistatischen Kontakt nicht mehr zulässig. Die Kräfte lassen sich mit speziellen Messgeräten dynamisch kontrollieren.
Risikobeurteilung der gesamten Applikation
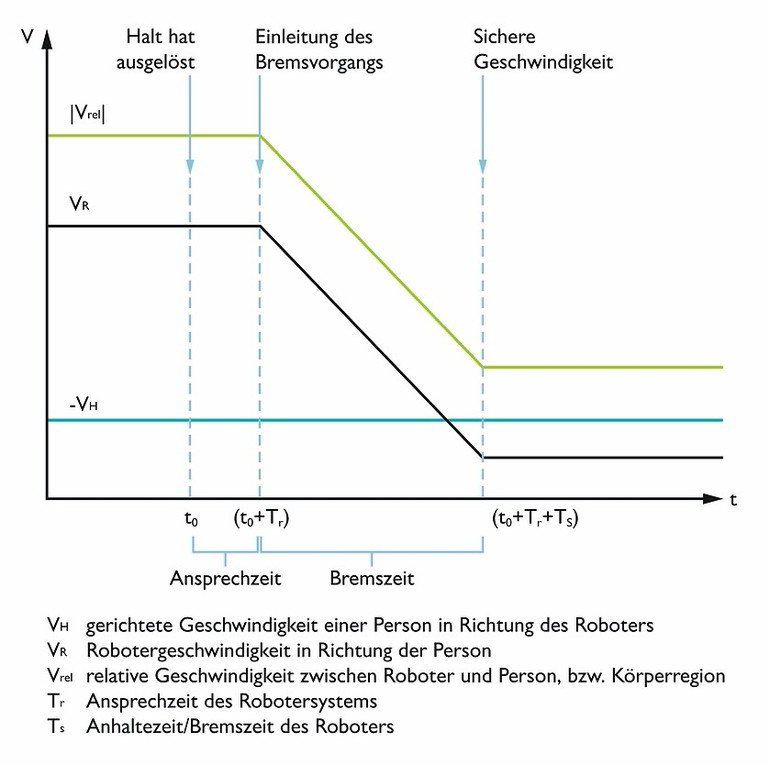
Wie schon erwähnt, haben die Geschwindigkeiten in Kombination mit der Masse von Roboter und Körper ebenfalls einen maßgeblichen Einfluss auf die auftretenden Kräfte. Der zulässige Geschwindigkeitsgrenzwert für den transienten Kontakt – also den freie Stoß – kann unter Berücksichtigung der effektiven Masse des Roboters, der maximalen Druck- respektive Kraftwerte, der effektiven Federkonstanten sowie der effektiven, jeweils auf die Körperregion bezogenen Masse errechnet werden. Wird die sichere Geschwindigkeit erst durch die Detektion von Personen eingeleitet, ist zu beachten, dass die jeweiligen Sicherheitsabstände für die Sensorik ermittelt werden müssen. Hierbei hat der Planer auch die Annährungsgeschwindigkeit des Menschen zu bedenken.
Sind alle Maßnahmen realisiert, müssen sie anschließend validiert und dokumentiert werden. Kräfte, die möglicherweise vorkommen können, sind über eine Messung zu prüfen. Als unvollständige Maschine bildet der Roboter selbst nur zusammen mit den für die Arbeitsaufgabe notwendigen Greifern und Vorrichtungen eine vollständige Maschine gemäß Maschinenrichtlinie. Vor diesem Hintergrund ist bei der Risikobeurteilung immer die gesamte Applikationen mit sämtlichen Bestandteilen in die Überlegungen einzubeziehen.
Leistungsspektrum in allen Zyklusphasen
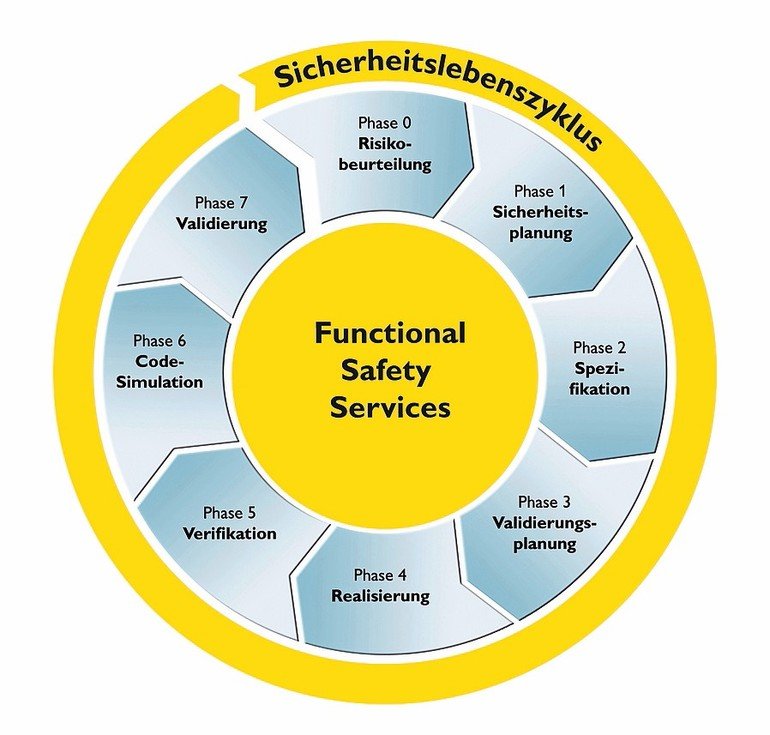
Wie bei jeder Maschine muss der Anlagenbauer respektive Systemintegrator auch für die Roboterapplikation eine EG-Konformitätserklärung ausstellen und ein CE-Zeichen anbringen. Die Mitarbeiter des Competence Center Safety von Phoenix Contact unterstützen im Bereich der funktionalen Sicherheit und Maschinenrichtlinie in allen Phasen des Sicherheitslebenszyklus mit umfassenden Dienstleistungen und Schulungen. ge
Weitere Informationen bietet das DGUV-Dokument:




{kind=link}