Über den gesamten Lebenszyklus von Maschinen und Anlagen hinweg nimmt das Volumen der zu erfassenden und verarbeitenden Daten zu – Big Data eben. Dabei unterscheiden sich die Anforderungen zwischen der Engineering-Phase und dem laufenden Betrieb so gut wie nicht, weshalb sich das Twincat Scope als modernes und hochperformantes Charting-Tool anbietet. Eine wichtige Rolle spielt dabei der Mehrkern-CPU-Support. Obwohl es sich um ein Standardprodukt des Twincat-Systems handelt, lässt es sich an die individuellen Wünsche anpassen.
Der Autor:Pascal Dresselhaus, Produktmanager Twincat, Beckhoff Automation
Die Datenerfassung an Maschinen ist – gerade vor dem Hintergrund von Industrie 4.0 und ‚Big Data‘ – nicht mehr nur ein Thema für Prüfstandsbetreiber. An immer mehr Produktionsmaschinen müssen Daten über den Lebenszyklus der Maschine hinweg gesammelt werden: Während der Inbetriebnahme für die Einstellung und Optimierung der Maschine, im laufenden Betrieb zu den jeweils herzustellenden Produkten sowie zur Erhöhung der Verfügbarkeit der Maschinen im Rahmen von Condition-Monitoring-Systemen. Hinsichtlich der Anforderungen gibt es dabei so gut wie keine Unterschiede zwischen der Engineering-Phase und dem laufenden Betrieb. Die Daten müssen grundsätzlich in der zeitlich korrekten Reihenfolge mit höchster Performance grafisch übersichtlich dargestellt werden. Die Integration eines Charting-Tools in die Entwicklungsumgebung für die Maschinensoftware ist unbedingt notwendig für höchste Engineering-Performance. Das Twincat Scope erfüllt alle diese Anforderungen und wurde in Hinblick auf die Darstellung vieler Kanäle weiter optimiert.
Architektur
Twincat 3 Scope ist ein Software-Oszilloskop, mit dem Variablen aus dem Automatisierungssystem grafisch dargestellt und analysiert werden können. Es besteht aus zwei Komponenten, dem
- Scope View für die grafische Darstellung der Signalverläufe und
- dem Scope Server, welcher für die eigentliche Datenaufzeichnung verantwortlich ist.
Der Scope Server kann für Aufzeichnungen auch ohne die View-Komponente autark auf einem Zielgerät installiert werden. Die Ansteuerung erfolgt in diesem Fall über einen SPS-Baustein, welcher das Laden von Konfigurationen sowie das Starten und Stoppen von Aufnahmen bis hin zum Abspeichern der Daten übernehmen kann. Wird das Scope View für die Ansteuerung verwendet, kann der Scope Server auf dem Remotegerät oder lokal auf dem Engineeringgerät installiert sein. Dadurch, dass der lokale Server für die Aufnahme von Daten ausreichend ist, eignet sich das Scope ideal für Service-Techniker: Um eine hochgenaue und grafisch aufbereitete Analyse der Maschine durchführen zu können, muss keine zusätzliche Software auf dem Zielgerät installiert werden. Der Service-Techniker kann sich direkt verbinden und etwa eine triggergesteuerte Konfiguration starten. Im Service-Fall bietet sich häufig ein Stop-Record-Trigger an, bei dem eine Pre- und Post-Triggerzeit einstellbar ist. Die Aufnahme läuft dabei im Ringpuffer, wodurch der Zeitraum vor dem Triggerereignis und die Auswirkungen des Ereignisses selbst in einer Aufnahme aufgezeichnet werden.
Der Konfigurations- und Anzeigeteil des Scope ist wie das Engineering von Twincat 3 selbst in Microsoft Visual Studio integriert. Insbesondere bei der Maschineninbetriebnahme ist es ein Vorteil, wenn das im Measurement-Projekt gehostete Scope View in Visual Studio parallel zum Twincat-Projekt innerhalb einer Solution existieren kann. Mit der Docking-Windows-Funktion kann man die grafische Anzeige des Scope View und den Programmcode oder die Hardware-Konfiguration direkt nebeneinander legen. So werden die Auswirkungen von abgearbeiteten Programmabschnitten oder neu eingestellten Hardware-Parametern immer direkt grafisch aufbereitet, was bei der Analyse hilfreich für den Nutzer ist. Gleichzeitig kann das Scope View aufgrund des eigenen Projektes ganz allein, also unabhängig von einem Twincat-Projekt, in einer Solution existieren. Ist auf einem Runtime-System kein Visual Studio vorhanden, installiert Scope View automatisch die Visual-Studio-Shell, um sich dann dort hinein zu integrieren. Eine zusätzliche Installation von Microsoft ist somit nicht notwendig.
Anwendungsfälle
Das ursprüngliche Entwicklungsziel für das Twincat Scope war ein Tool, welches Ingenieure, Techniker und Programmierer bei der Maschineninbetriebnahme und der Fehlersuche unterstützt. Dafür ist es von enormer Wichtigkeit, dass dieses Tool die Daten zyklusgenau erfasst – auch noch bei Zykluszeiten von 50 µs. Mit der Oversampling-Technologie ist es sogar möglich, Signale noch schneller als mit der eigentlichen Zykluszeit abzutasten. Diese Werte sollten natürlich ebenfalls darstellbar sein – weswegen es möglich ist, im Chart-Display bis in den µs-Bereich hinein zu zoomen. Bei einer zyklusgenauen Analyse helfen die in Scope View verfügbaren Cursor, mit denen beispielsweise Differenzen auf X- und Y-Achsen angezeigt werden können. Aber auch der Datenpicker, der beim Anklicken von Datenpunkten als Tool-Tipp erscheint und die Werte für die X- und Y-Achse anzeigt, ist sehr hilfreich.
Des Weiteren wird das Twincat Scope häufig bei der Inbetriebnahme von Antriebsachsen eingesetzt, weil Signale beliebig, auch während einer Aufnahme, in Charts oder Y-Achsen übereinander gelegt und verglichen werden können. Mit dem XY-Plot können Verfahrwege von Antrieben – insbesondere bei CNC-Anwendungen – grafisch dargestellt werden. Um die erste Antriebsachse in einer Twincat-Konfiguration mit allen wichtigen Parametern aufzuzeichnen, reichen gerade einmal fünf Mausklicks: Ein entsprechendes NC-Template im Projekt-Wizard selektieren, danach auf die Start-Record-Taste drücken und schon startet die Aufnahme mit den wichtigsten Daten einer Achse (Position, Geschwindigkeit usw.). Mit der Copy- und Multiselect-Funktion kann das Template leicht auf beliebig viele Achsen innerhalb der Steuerungskonfiguration ausgeweitet werden.
Mit Twincat 3 Engineering werden immer ein Scope View und ein lokaler Scope Server installiert. Beide Komponenten sind mit den beschriebenen Funktionalitäten und vielen weiteren lizenzkostenfrei in der Basisversion enthalten.
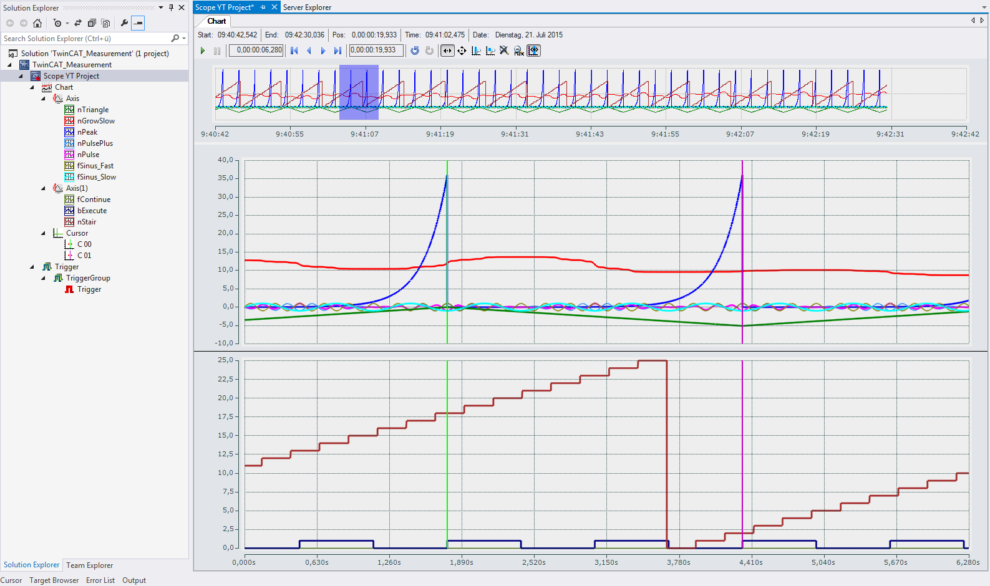
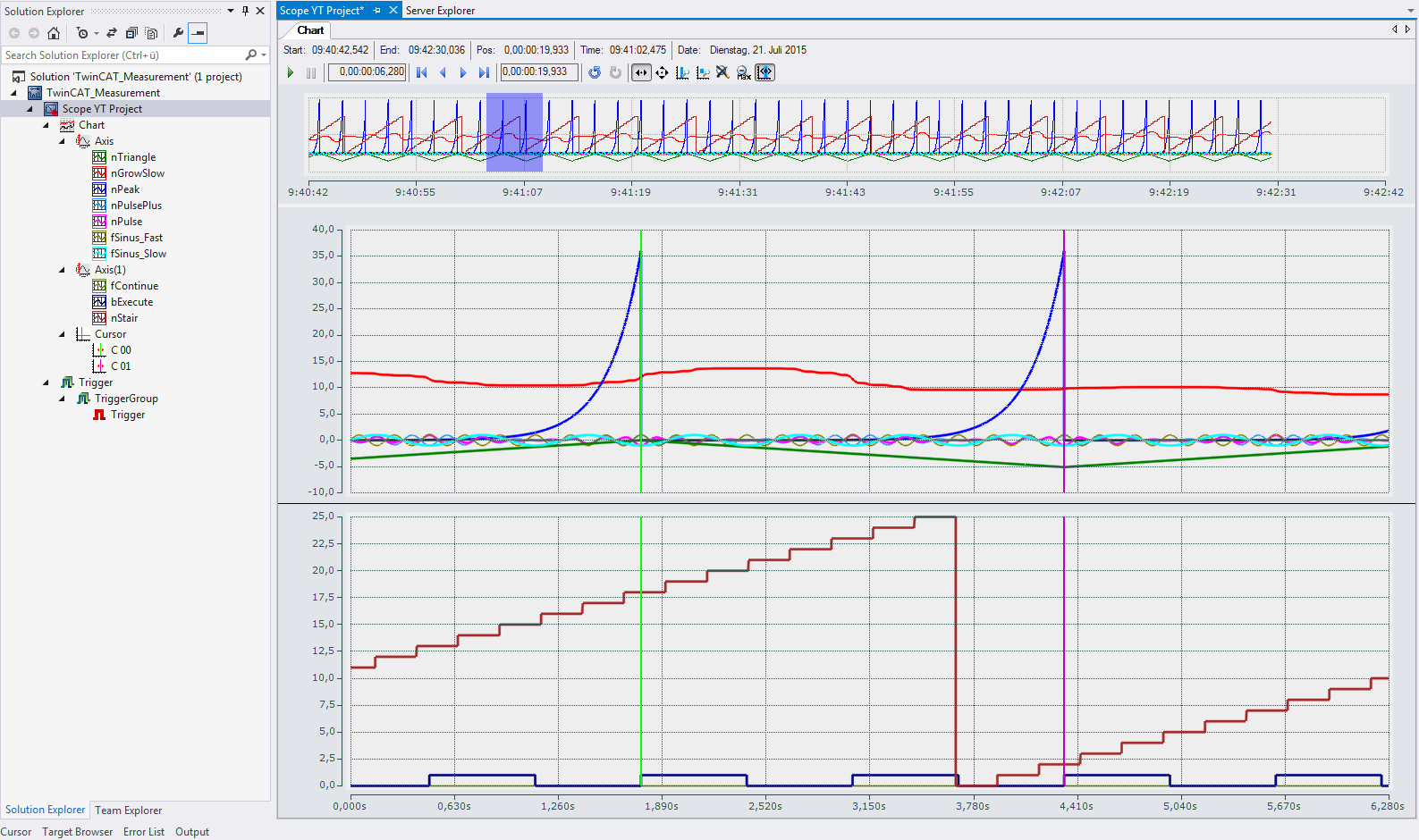
Viele Funktionalitäten des Twincat Scope eignen sich auch hervorragend für die Prozessüberwachung. Das wichtigste Merkmal dabei ist die Möglichkeit, Langzeitaufnahmen über mehrere Tage durchzuführen. Zwischenergebnisse können parallel zur Langzeitaufnahme konsistent triggergesteuert auf der Festplatte abgelegt werden. Manuell oder per Kommandozeilenaufruf automatisiert können die Scope-spezifischen Datendateien in diverse andere Datenformate exportiert werden. Auch während einer Langzeitaufnahme kann der Nutzer die Online-Darstellung des Displays anhalten und die Ergebnisse mit verschiedenen Zoom-Funktionalitäten näher betrachten. Um bei komplexen Darstellungen mit vielen Kurven die Übersicht zu behalten, kann man ein sogenanntes Overview-Chart einblenden. Dieses ‚Chart im Chart‘ zeigt auf einer absoluten Zeitachse die im Hintergrund weiter eintreffenden Daten an. Das bläuliche Fenster im Overview-Chart in Abbildung 1 markiert die aktuelle Stelle, an der man sich im Haupt-Chart befindet. Diese Markierung ist variabel, wodurch man sehr einfach von Ereignis zu Ereignis springen kann, ohne aufwändig im Haupt-Chart zu scrollen und zu zoomen.
Bei solchen Langzeitaufnahmen entstehen naturgemäß sehr große Datenvolumen. Diese entstehen durch Abtastraten von 20 kHz und mehr pro Kanal und werden durch das Schlagwort ‚Big Data‘ treffend beschrieben. Diese großen Datenvolumen müssen jedoch entsprechend verwaltet und gespeichert werden können, um sie für eine anschließende Analyse und Auswertung verwertbar bereit zu stellen.
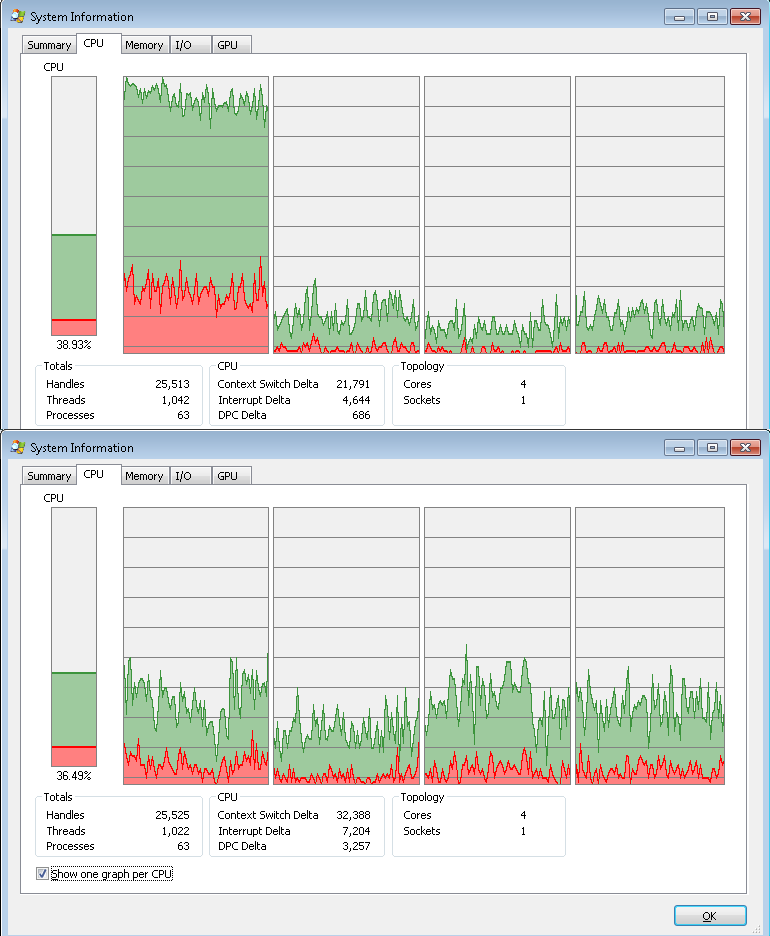
Beispiel:Die Feldbuszykluszeit von 1 ms entspricht einer Abtastrate von 1 kHz.Schon bei einer Aufzeichnungsdauer von einer Stunde entsteht inklusive Zeitstempel bei dem gezeigten Beispiel mit 65 Kanälen ein Datenvolumen von mehr als 3,8 GB. Doch manchmal ist es nicht erforderlich, jedes Prozessdatum mit der Steuerungszykluszeit als Abtastrate aufzuzeichnen. Notwendig kann eine zyklusgenaue Abtastung bei Daten einer Antriebsachse oder bei Beschleunigungssensoren sein, jedoch nicht unbedingt bei Temperatursensoren, die sich ebenfalls im System befinden. Daher ist es möglich, in Scope View für jeden Kanal eine individuelle Abtastrate einzustellen. Reduziert man allein für die 40 Integer-Variablen die Abtastrate von 1000 Werten/s auf nur noch einen Wert pro Sekunde, ergibt sich eine Verringerung des Speicherbedarfs von über 1,5 GB pro Stunde.
Performance
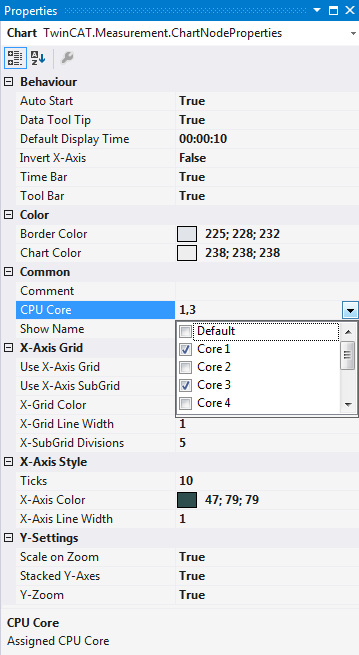
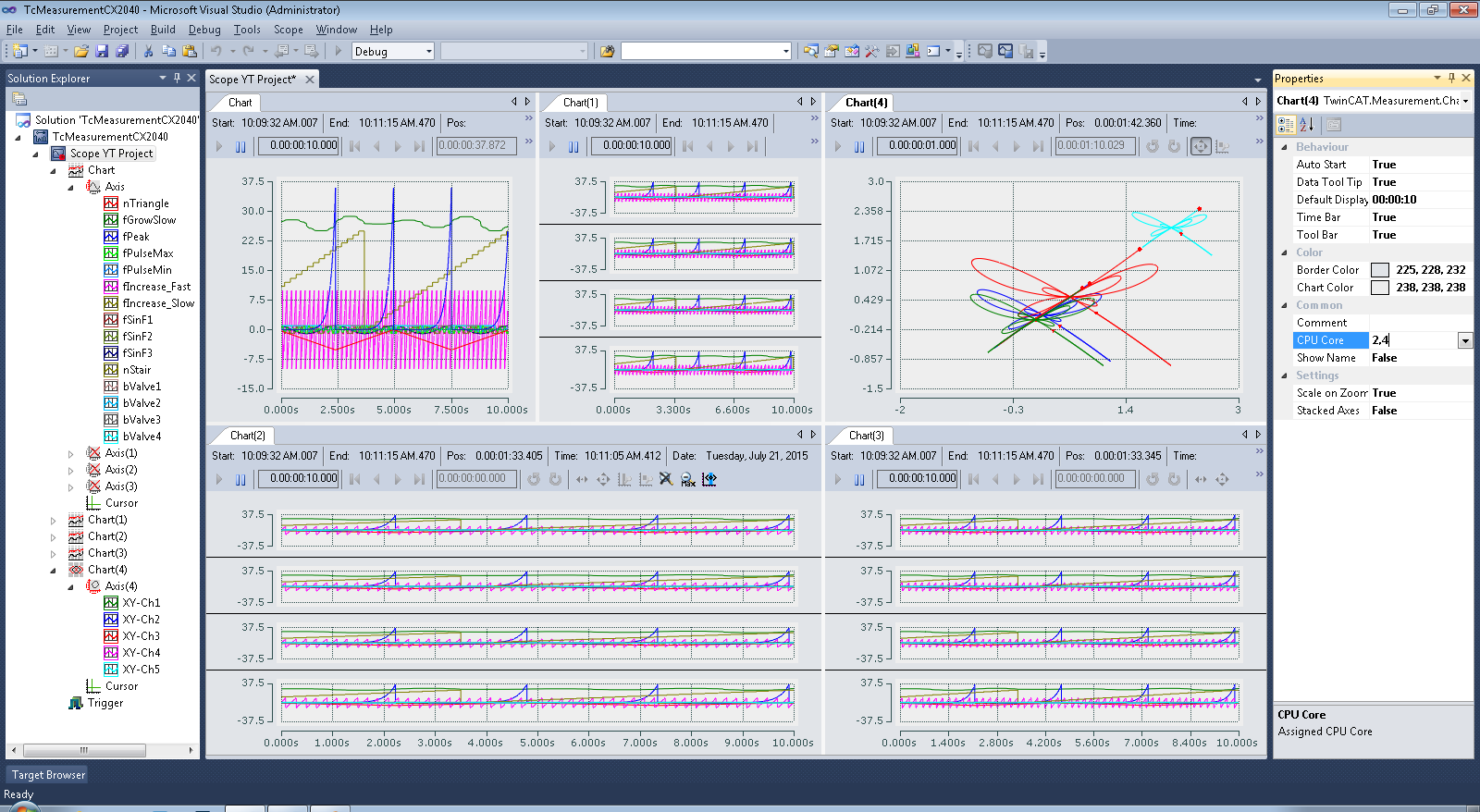
Das Nadelöhr bei komplexen Scope-Konfigurationen ist selten die Datenaufzeichnung an sich. Neben dem hohen Datenaufkommen ist eher die Darstellung vieler Kanäle mit hoher Abtastrate aufwändig. In erster Linie ist dies abhängig von den Systemressourcen wie CPU-Leistung, Grafikkarte und Arbeitsspeicher. Jedoch muss auch bei einem leistungsstarken System die Software in der Lage sein, vorhandene Ressourcen effizient zu nutzen. Twincat 3 ist eine solche Software: In der Runtime von Twincat 3 können Echtzeit-SPS-, -NC-, -C++- oder -Matlab/Simulink-Tasks in unterschiedlichen Zykluszeiten auf verschiedenen Kernen der CPU ausgeführt werden. So kann die Automatisierungssoftware direkt von der Weiterentwicklung der PC-Technologie profitieren, welche Prozessoren mit immer mehr Kernen und folglich wachsender Performance zur Verfügung stellt. Auch das Scope View ist jetzt in der Lage, ein Multicore-System ideal zu nutzen, indem es einen oder mehrere Kerne der CPU für die Darstellung der Signale verwenden kann. Für jedes Chart innerhalb einer Scope-Konfiguration ist individuell einstellbar, von welchem Kern die Rechenleistung zur Darstellung der Signale genutzt werden soll. Bei komplexen Charts, beispielsweise mit mehreren Kanälen und Achsen in XY-Darstellung, können auch mehrere CPU-Kerne für ein Chart genutzt werden. Die entsprechende Auswahl kann der User im Property-Fenster (siehe Abbildung 2) des Visual Studio für das jeweils selektierte Chart vornehmen. Sind auf dem Zielgerät CPU-Kerne durch die Twincat-Konfiguration isoliert worden, damit diese von Windows nicht mehr genutzt werden, können diese in der Scope-Konfiguration automatisch ebenfalls nicht mehr ausgewählt werden. Die Twincat-Echtzeit behält so die isolierten Kerne für sich. Um die Performance in der Darstellung weiter zu verbessern und sie an das vorhandene Gerät anzupassen, unterstützt das Scope View außerdem zwei Grafik-Bibliotheken: GDI+ und DirectX. Für DirectX-fähige Geräte steigert diese Bibliothek deutlich die Zeichenleistung, denn bei DirectX wird die Berechnung der Graphen auf die Grafikkarte ausgelagert, was die CPU deutlich entlastet. Der Grafikchipsatz ist für das Grafikrendering ausgelegt und kann dadurch deutlich mehr Datenpunkte darstellen als die GDI+-Variante über die CPU. Die Multicore-Unterstützung in Kombination mit der DirectX-Grafik sorgt für einen deutlichen Leistungssprung bei der Darstellung von Signalen.
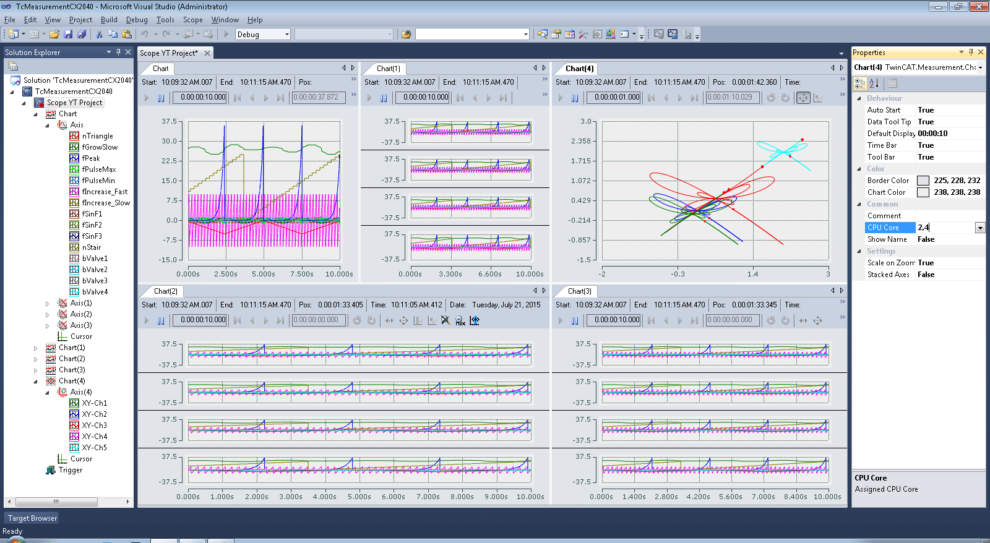
Beispiel:Auf einem CX2040-Embedded-PC von Beckhoff mit einem Vierkernprozessor des Typs Intel Core i7 2715QE (2,1 GHz) ist die Darstellung von rund 60 Signalen aufgeteilt auf fünf gleichzeitig dargestellte Charts möglich. Mit der Umschaltung von GDI+ auf DirectX und der Zuweisung von jedem Chart auf einen eigenen beziehungsweise auf mehrere Kerne der CPU können über 230 Signale live aufgezeichnet und dargestellt werden. Abbildung 3 zeigt Scope View während dieser Aufnahme, bei der alle Signale mit einer Millisekunde abgetastet werden.
Beide Eigenschaften, der Multicore-Support und die Grafik-Bibliotheken, stehen auch für die sogenannte Scope-Control-Integration zur Verfügung. Die Scope-Control-Integration beschreibt die Möglichkeit, das Charting des Scope View in die eigene .NET-basierte Visualisierung als fertiges Control-Element einzubinden. Damit sind nicht nur das Datenhandling bei der Aufzeichnung, sondern auch Control-Funktionalitäten wie Zoom, Panning, Overview-Chart etc. bereits umgesetzt. Somit muss für die eigene Visualisierung weder ein selbst erstelltes noch ein 3rd-Party-Charting-Tool implementiert werden. Dadurch sinkt der Engineeringaufwand deutlich. Letztendlich kann der Anwender also ein Standardprodukt, welches von Beckhoff gepflegt wird, zur Erstellung eines völlig individuell konfigurierbaren und aussehenden Software-Oszilloskops einsetzen. co
Kontakt
Beckhoff Automation GmbH & Co. KG, Verl
Tel. +49 5246 963-0
www.beckhoff.de
www.beckhoff.de/tc3-scope
SPS IPC Drives: 7-406
Details zu Twincat 3:
www.beckhoff.de/twincat3
Teilen:




{kind=link}