
Das Handling von Bauteilen und Werkstücken ist ein Standardprozess bei der Herstellung komplexer Produkte. Dabei liegt die Herausforderung in der positions- und lagerichtigen Teilebereitstellung. Bei der optisch kontrollierten Teilezuführung werden die Schikanen am Rütteltopf durch einen bildverarbeitenden Vision-Sensor ersetzt, sodass sich die Rüstzeiten bei Produktwechseln signifikant reduzieren lassen. Zur Vereinzelung der als Schüttgut angelieferten Teile bietet sich der Einsatz eines Vibrationsfeeders an, bei dem die Vereinzelung teileschonend auf einer ebenen, vibrierenden Plattform stattfindet. Der Sensor erkennt Position und Ausrichtung jedes Teils und liefert diese Daten an den Roboter; auch die gleichzeitige Detektion mehrerer Teile mit einer Bildaufnahme ist möglich. Verbliebene Agglomerate sowie andere nicht erfassbare Teile werden ebenfalls erkannt und entsprechende Signale an die Steuerung gesandt, die den Feeder dann nachrütteln lässt.
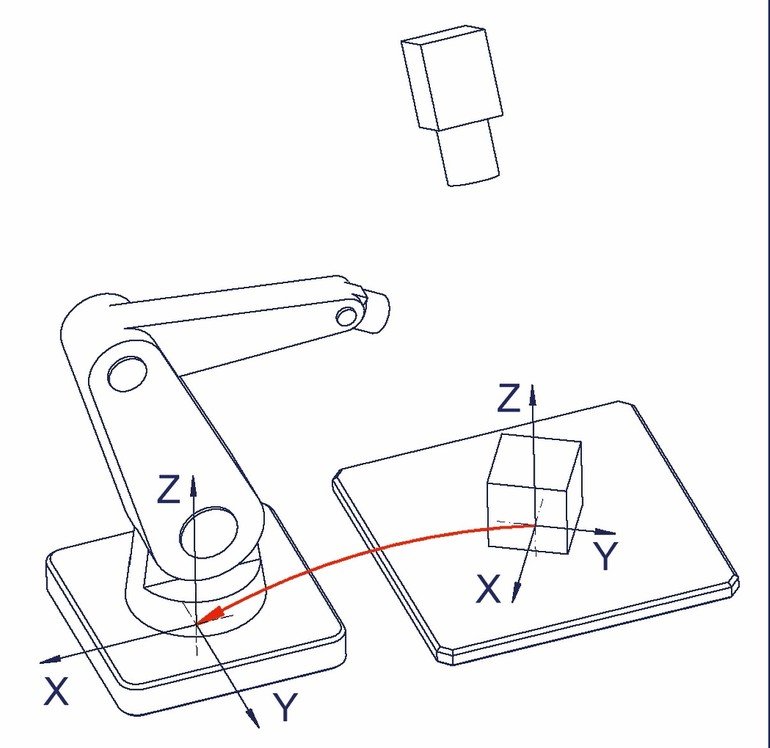
Damit die Datenübermittlung vom Vision-Sensor zum Roboter reibungslos klappt, müssen die von der Kamera gelieferten Bildkoordinaten zuerst in Roboterkoordinaten umgerechnet werden. Dies war bisher mit einem erheblichen Programmieraufwand in der Steuerungssoftware des Roboters verbunden. Effizienter lässt sich die Koordinatentransformation mit Hilfe einer Kalibrierung durchführen, wie sie der Visor Robotic von SensoPart ermöglicht. Der Vision-Sensor liefert die Positionsdaten im passenden Roboterformat.
Die Kalibrierung des Vision-Sensors behebt zugleich ein weiteres Problem: Bei seitlicher Detektion eines dreidimensionalen Objekts kommt es zwangsläufig zu perspektivischen Verzerrungen, hinzu kommt die Verzeichnung durch das Objektiv. Damit der Roboter nicht danebengreift, müssen beide Effekte bei der Koordinatentransformation berücksichtigt und korrigiert werden.
Teach-in statt Programmierarbeit
Die praktische Durchführung der Kalibrierung ist für den Anwender wenig aufwändig und erfordert keinerlei Programmierarbeiten. Benötigt wird nur eine Kalibrierplatte, die als Zubehör verfügbar ist. Diese Platte wird im Sichtfeld des Vision-Sensors platziert. Für die Anwendung der Teilezuführung mittels Vibrationsfeeder eignet sich die Methode über eine Kalibrierplatte. Zur Kalibrierung des Visor-Bildes stehen Kalibriermuster in verschiedenen Größen zur Verfügung. Über aufgebrachte Referenzmarken kann der Anwender mit Hilfe einer Messspitze die Lage der Platte bestimmen. Die ermittelten Koordinatenwerte können über die Visor-Konfigurationssoftware eingetragen werden. Durch diesen Prozess kann das ursprüngliche Visor-Koordinaten- in das Roboterkoordinatensystem transformiert werden. Nach diesem einmaligen Teach-in-Vorgang erfolgt die Umrechung automatisch.
Sollten sich die Teile der realen Anwendung geometrisch vom Kalibrierteil unterscheiden oder Teileformen häufiger wechseln, lässt sich die Kalibrierung auf einfache Weise nachträglich anpassen. So kann ein vertikaler Versatz zwischen Kalibrier- und Messebene berücksichtigt werden. Außerdem ist eine Greifpunktkorrektur möglich, falls das Teil nicht mittig, sondern z.B. an einem seitlichen Anfasser gegriffen werden soll. Mit der Funktion Greiferfreiraumprüfung kann ermittelt werden, ob der verfügbare Freiraum rund um das zu greifende Teil für eine sichere Aufnahme ausreicht. Alle diese Funktionen sind im Sensor implementiert, sodass an keiner Stelle in die Robotersteuerung eingegriffen werden muss.
Die beschriebenen Kalibrierschritte können auch automatisiert werden, indem die Robotersteuerung entsprechende Schnittstellenkommandos über die im Visor integrierten Schnittstellen übermittelt. Diese Vorgehensweise empfiehlt sich etwa bei einem Umbau oder einer Nachjustage von Anwendungen, z.B. wenn nach einer Erstkalibrierung durch den Integrator eine Rekalibrierung durch den Maschinenbediener vorgenommen werden soll. Besonders komfortabel gestaltet sich dabei das Zusammenspiel von SensoParts-Vision-Sensor mit Robotern des Herstellers Universal Robots (UR): Über das URCap, welches die Schnittstelle zwischen Visor und Roboter bildet, lässt sich die Kalibrierung direkt aus der Steuerungssoftware (Programmiergerät) des Roboters heraus vornehmen.
Konfigurieren statt programmieren
Vor allem bei Bauteilen mit komplexen Geometrien empfiehlt sich anstelle einer mechanischen Zuführeinrichtung die flexible und teileschonende optische Teileerfassung mittels Vision-Sensor. Die Kalibrierfunktion des Visor Robotic von SensoPart ermöglicht dabei eine einfache Transformation von Bild- in Roboterkoordinaten: Die mit wenigen Mausklicks durchzuführende Kalibrierung ersetzt die frühere aufwändige Einrichtung in der Robotersteuerung. jke
Details zu Visor Robotic




{kind=link}