Inhaltsverzeichnis
1. Anwendung Umfeldsensorik
2. Das ROSE-Filter
3. Zu dieser Serie
Für viele Anwendungen stellt das Kalman-Filter das geeignete Verfahren dar. Es ist möglich, mit diesem Verfahren messtechnisch erfassbare Größen zu filtern und unter bestimmten Voraussetzungen auch unbekannte Größen zu schätzen. Im Gegensatz zu klassischen FIR (Finite Impulse Response)-Filtern und IIR (Infinite Impulse Response)-Filtern besitzen Kalman-Filter keine Gruppenlaufzeit. Basis des Kalman-Filters ist ein physikalisches Modell, dessen Differentialgleichungen im Zustandsraum beschrieben werden. Mess- und Modellungenauigkeiten werden durch die jeweiligen Kovarianzmatrizen wiedergegeben.
In vielen Anwendungen kann nicht davon ausgegangen werden, dass die Kovarianzmatrizen zeitinvariant sind. Hierfür müssen die beiden Kovarianzmatrizen adaptiv bestimmt werden. Das ROSE (Rapid Ongoing Stochastic covariance Estimation)-Filter ist hierfür eine gute Möglichkeit, dieses Problem zu lösen. Dieses Filter ist in der Lage, in Echtzeit die Kovarianzmatrizen des System- und Messrauschens adaptiv abzuschätzen und ermöglicht somit eine optimale Schätzung der Zustandsgrößen.
Anwendung Umfeldsensorik
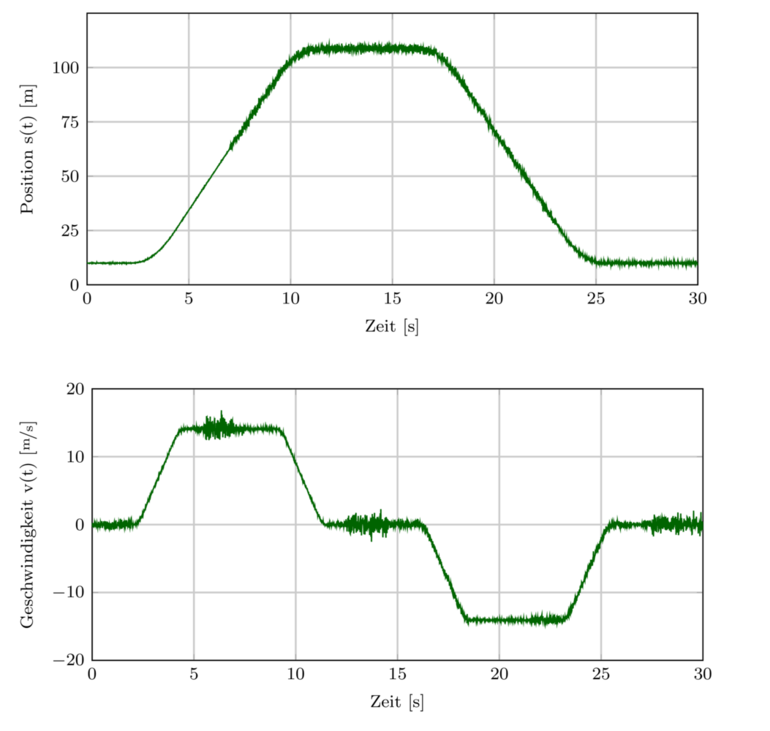
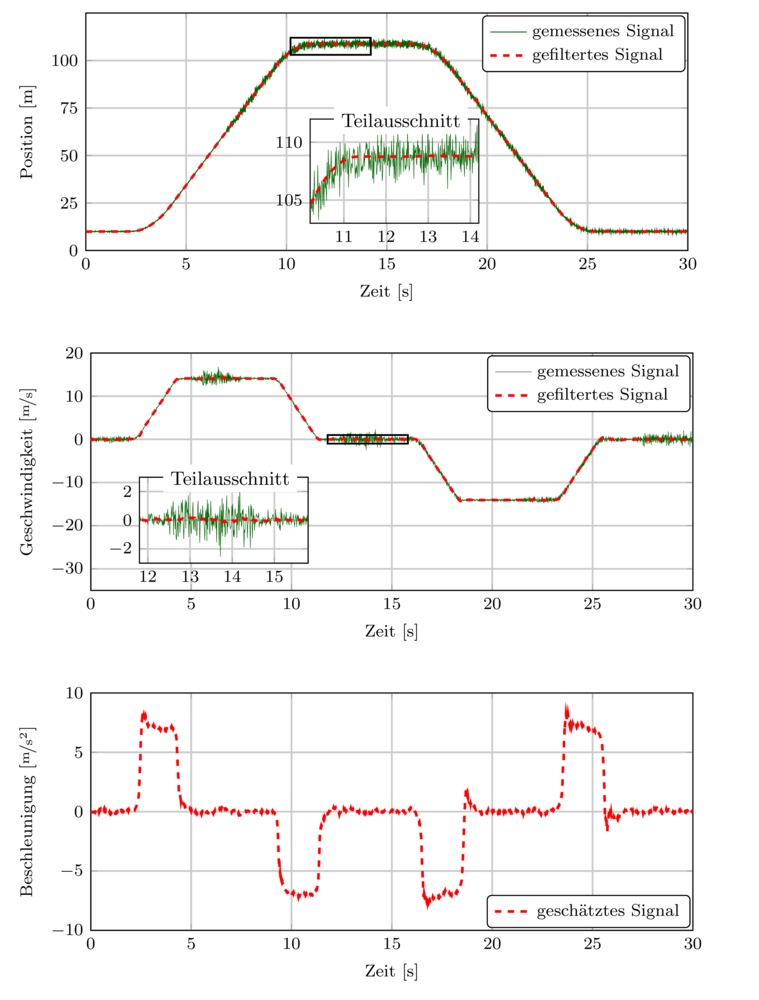
Umfeldsensoren, beispielsweise Radarsensoren, sind in der Lage die Position und die Geschwindigkeit von Objekten zu erfassen. Deren Messrauschen wird oft durch zeitvariante Kovarianzmatrizen beschrieben. Abbildung 1 zeigt einen solchen simulierten Verlauf von Messgrößen mit zeitvariantem Messrauschen. Bei dem Ansatz, diese Sensormessgrößen mittels Kalman-Filter zu glätten, entstehen je nach verwendetem Modell auch zeitvariante Kovarianzmatrizen, die die Modellungenauigkeiten (Systemrauschen) beschreiben.
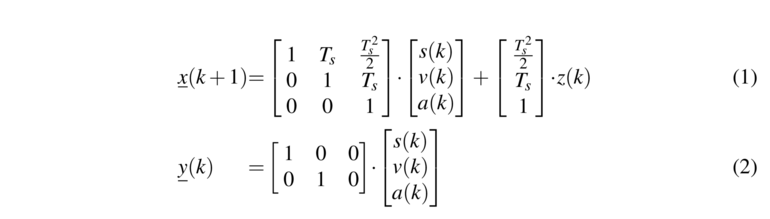
Modelliert man das dynamische Verhalten durch ein Punkt-Masse-Modell mit zeitlich konstanter Beschleunigung, so lautet dessen zeitdiskrete Systembeschreibung:
Ts beschreibt die Abtastzeit und z(k) die Modellungenauigkeit (Systemrauschen).
Typisch für solche Anwendungsfälle ist, dass sich das Mess- und das Systemrauschen während der Messung immer wieder verändert und somit mit einem klassischen Kalman-Filteransatz mit zeitinvariantem Mess- und Systemrauschen keine optimale Schätzung der Zustandsgrößen erreicht werden kann.
Das ROSE-Filter
Das ROSE-Filter ist im Gegensatz zu einem klassischen Kalman-Filter mit zeitinvarianten Mess- und das Systemrauschen in der Lage, die zeitvarianten Kovarianzmatrizen des Mess- und Systemrauschens in Echtzeit zu schätzen. Basis hierfür ist die Schätzung der zeitvarianten Größen durch weitere spezielle Kalman-Filter mit fester Verstärkung.
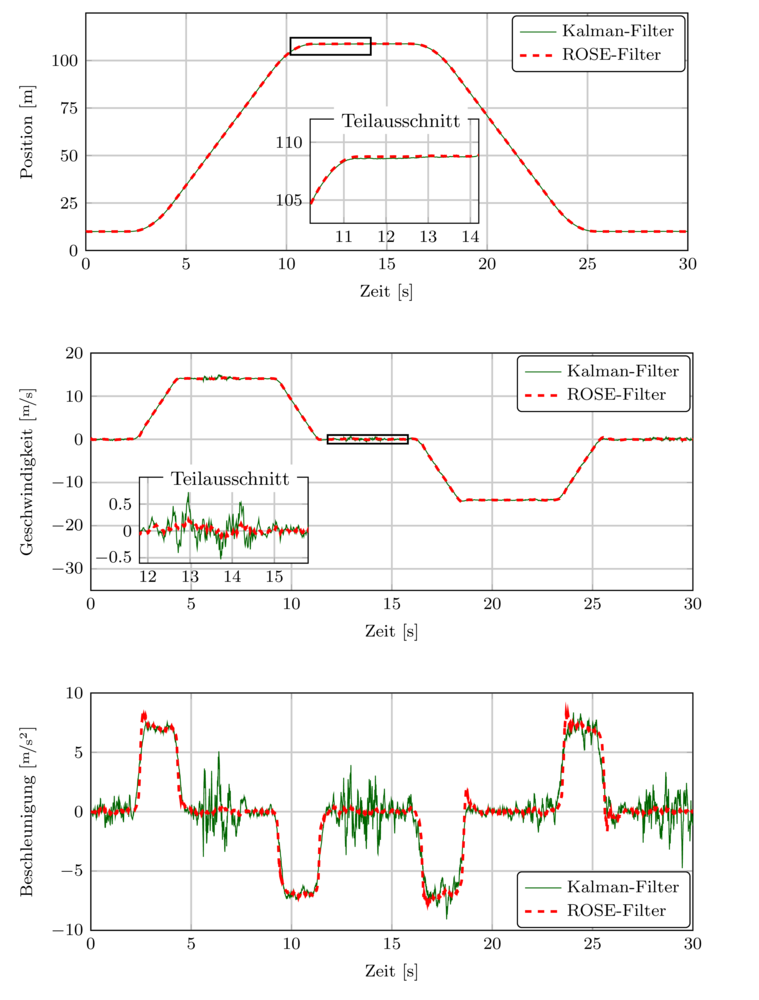
Vergleicht man das ROSE-Filter mit einem klassischen Kalman-Filter mit zeitinvarianten Kovarianzmatrizen ist ersichtlich, dass durch die adaptive Schätzung der Kovarianzmatrizen mittels ROSE-Filter eine bessere Schätzung der Zustandsgrößen möglich ist. eve

info
Zu dieser Serie
Zusammen mit der Technischen Akademie Esslingen stellt die elektro AUTOMATION in dieser Grundlagenserie Hintergründe und praktische Einsatzszenarien in aktuellen Technikfeldern
zusammen. Tipps zu passenden Seminarangeboten erleichtern
die Planung einer praxisorientierten Weiterbildung.
Erschienen sind bereits:
Teil 1: Einsatz von hybriden CPU-FPGA-Chips in
Embedded Systems: hier.pro/HMeEq
Teil 2: Elektrofahrzeuge – Standardisierte Integration in
Smart-Home-Systeme: hier.pro/L06ag
Teil 3: Protokollanalyse und Bestimmung der Phasen:
hier.pro/9ANhA
Teil 4: Dezentrale Antriebstechnik – Intelligenz im Antrieb: hier.pro/a4ecu




{kind=link}